Viscat builds a “brain” that unifies different types of robots into one
Precise factory operations without AI “hallucinations”… pursuing a knowledge-map-based solution
Decided to start the company after seeing 300kg loads carried in harsh conditions—work that shouldn’t be left to humans
Organically connecting heterogeneous robots… aiming to commercialize after completing validation in the second half of this year
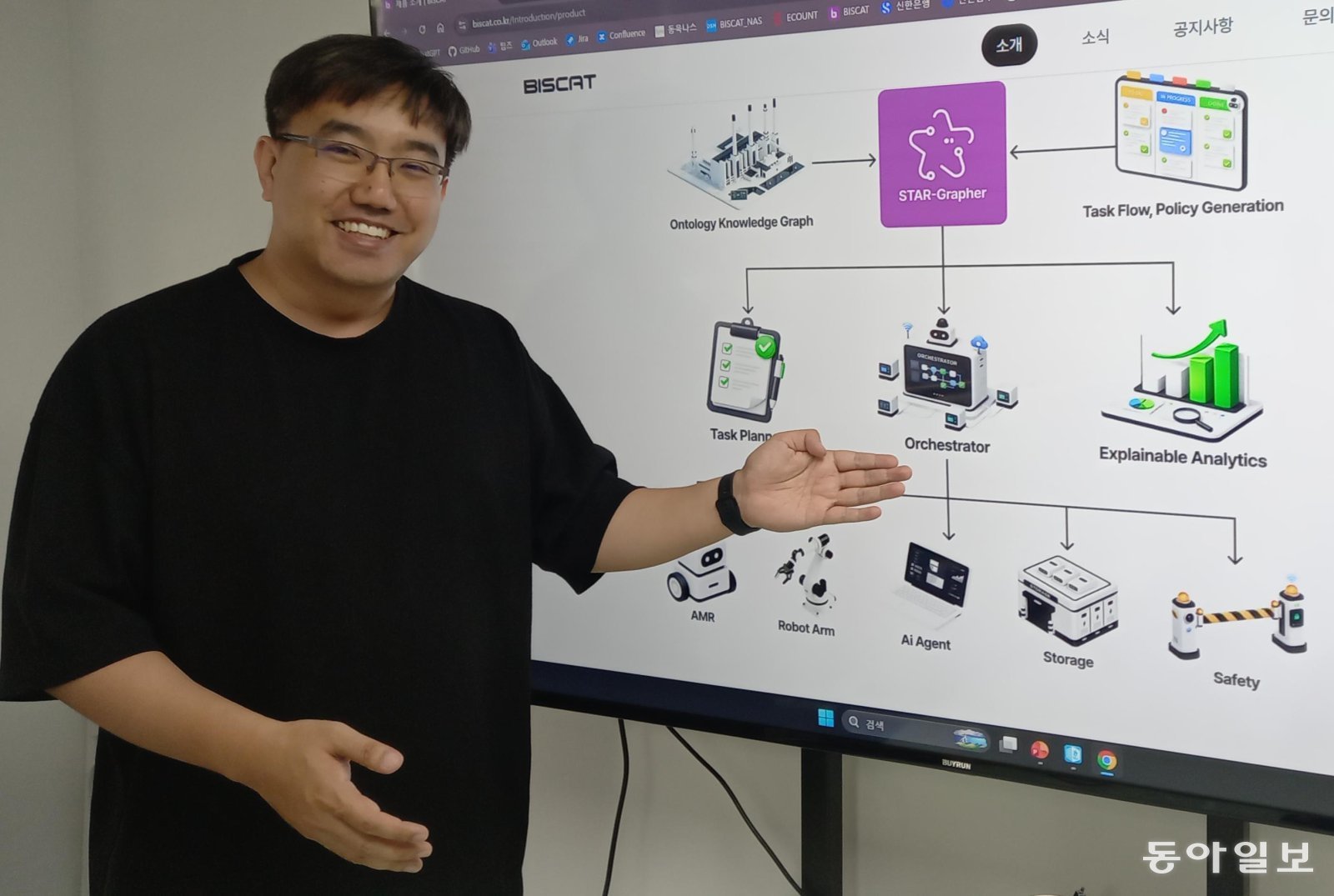
On 6 May, at VISCAT’s office in Seocho-gu, Seoul, CEO Ko Dong-uk explains that the “knowledge map”-based autonomous factory operation platform is “a brain that enables flexible factory operation without hallucination phenomena.” VISCAT expects it to become the core technology for dark factories, which are fully automated plants. Photo by reporter Heo Jin-seok, jameshur@donga.com
Imagine there are three helper robots at home. One is responsible for kitchen tasks, one for transporting items, and one for cleaning. The owner wants a robot to bring a cola. To take the cola from the refrigerator and deliver it to the owner, the three robots must cooperate. The kitchen robot has to open the fridge and take out the cola, and the transport robot has to receive it and bring it over. However, the kitchen robot does not know where the transport robot is at the moment, and the transport robot does not know when the cola will come out. To make matters worse, the cleaning robot is blocking the passageway while cleaning, but the other two robots are unaware of this. A system is needed that can tell them which one should move first, where items should be handed over, and how to reroute when a passageway is blocked.
Startup VISCAT develops a system that easily and quickly connects multiple types of robots so they can be operated efficiently. At the company’s office in Seocho-gu, Seoul, on 6 May, CEO Ko Dong-uk (43) described the current conditions at industrial sites where robots are integrated through the system integration (SI) approach, based on his own experience. At one electronic components plant, autonomous mobile robots, robotic arms and transport equipment were each introduced separately. There were five different suppliers involved. After six months of integration work, the system finally began running, but then the company that had deployed the robots changed its battery safety regulations. At that moment, all five suppliers had to gather again and modify their respective code. Ko said, “It is the epitome of inefficiency when even a small change forces the factory to shut down.”
Ko said, “It is like having all the instruments but no conductor. If each plays from its own sheet music, all you get is noise.” What VISCAT aims to build is precisely that conductor, a single brain shared by all robots.
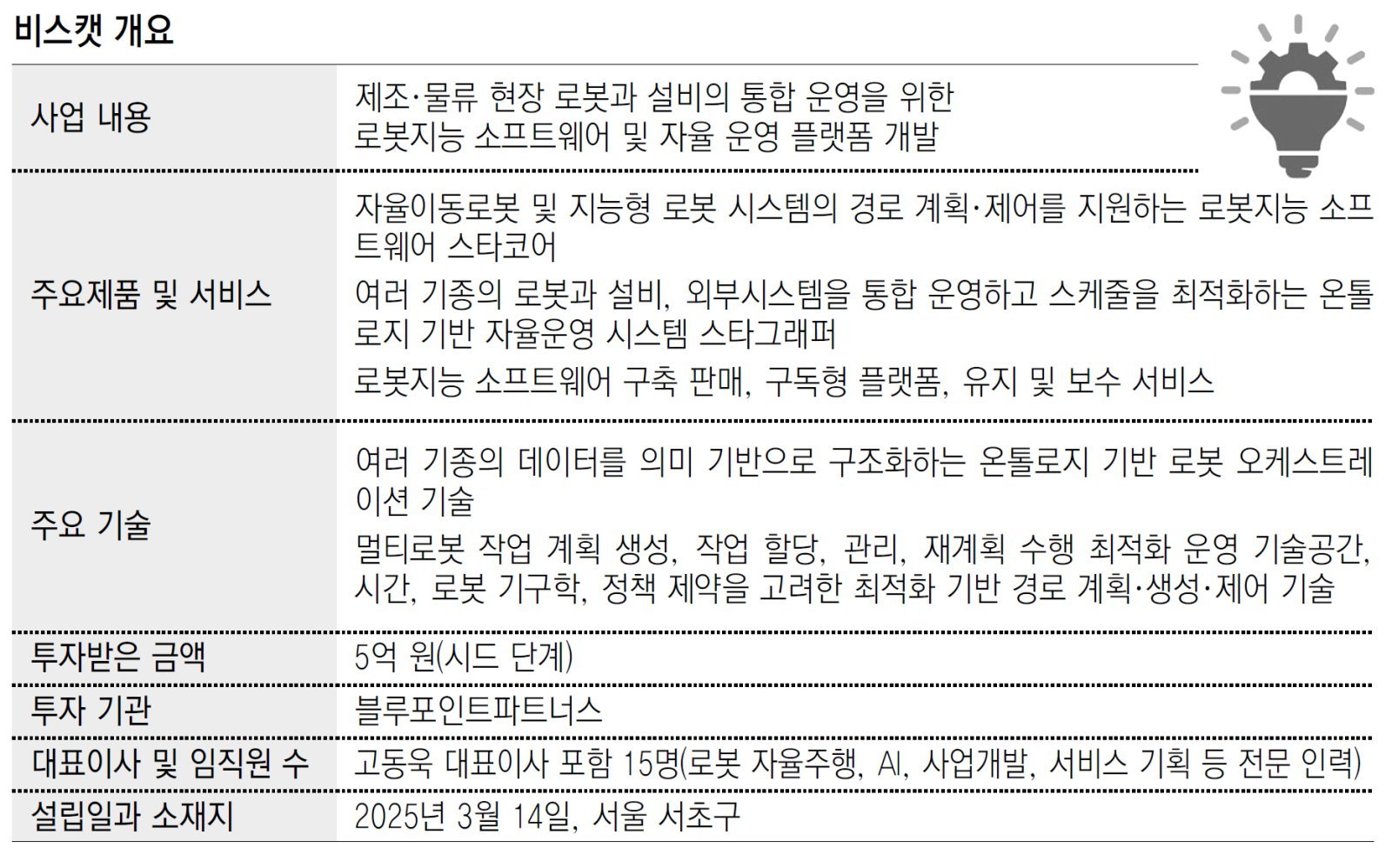
● Reading the factory with a ‘knowledge map’ VISCAT’s core technology rests on two pillars. The first is STAR-Grapher, an ontology-based operating system that integrates and operates various types of robots, equipment and external systems.
Ontology is a branch of philosophy that defines what exists and examines the relationships among entities. The same methodology is used in information technology (IT). For example, it structures what a robot is, what a battery is, and what relationship exists between a robot and a battery into a schematic (or map) that a computer can understand. Such a “knowledge map” is useful when a computer needs to determine whether the word “apple” refers to a kind of fruit or an expression of apology. If it is linked with concepts like “red” and “eat,” it is recognized as a fruit; if linked with “fault” or “forgiveness,” it is recognized as meaning an apology.
VISCAT’s key competitive strength lies in its ability to design and build knowledge maps precisely tailored to industrial sites where robots are deployed. Ko said, “To build an effective knowledge map, one must have rich domain knowledge about robotics—such as at what level to break down behavioral commands and in what language to deliver them—as well as field knowledge of manufacturing processes and equipment.” He added, “Globally, Palantir is a company that leads with ontology-based operating platforms, but its strength lies in data analytics and corporate decision-making. In the domain of robots’ physical movements and integrated operation of multiple heterogeneous robots, that is where VISCAT comes in.”
When systems are built using the ontology approach, connecting and operating robots becomes much easier. All that is required for a new robot is to link the roles it can perform into the “knowledge dictionary.” Even if the position of factory equipment changes or new safety regulations are introduced, the entire system understands and responds to the new conditions. When an item comes off the production line, the system automatically selects from among the robots capable of carrying it the unit with the highest remaining battery level that is closest and fastest, and issues a work command. STAR-Grapher dynamically understands factory conditions, makes decisions, and clearly explains the grounds for those decisions. It is currently on the verge of proof of concept (PoC).
The second pillar is STAR-Core, a robot intelligence software that handles path planning and control for autonomous mobile robots. When a robot carrying a long load must change direction in a narrow passageway, the conventional method required an engineer to manually set waypoints for each angle. With STAR-Core, once the robot’s shape and speed, spatial constraints and safety policies are entered, an optimization-based path is generated automatically. Just as a car repeatedly moves forward and backward in a tight parking space to find the optimal trajectory, the robot independently calculates the most efficient route.
● Decision made after seeing 300kg boxes moved in harsh conditions
Ko earned his master’s and doctoral degrees in robotics from Hanyang University. Before the advent of deep learning, he researched algorithms for environmental perception and autonomous driving. In 2017, after completing his PhD, he joined as a founding member of CoGa Robotics, which he established with his academic advisor. The company focused on service robots such as restaurant delivery robots, but Ko’s interest always pointed toward industrial sites. “I believed robots should go into difficult and dangerous places to substitute for humans,” he said.
He created a solutions division within the company and spent several years visiting factories himself. At a screw manufacturing plant, he witnessed foreign workers dragging 300kg boxes through heat and metal dust. “It is grueling enough to ruin a person’s health after only a few days,” he said. In electronics production lines, unmanned transport robots were sometimes used, but there were countless cases where months were wasted due to system integration issues. He explained his motivation for founding the company: “I wanted to make it easy to introduce robots into tough workplaces and properly solve situations where robots fail to operate well.”
Many of VISCAT’s executives and employees previously worked together in departments handling industrial robots at another robotics company. Courtesy of VISCAT
The decisive trigger for starting the company was a divergence in direction with his previous firm. When the company pivoted toward service robots and artificial intelligence (AI), Ko could not give up on manufacturing automation. In the end, members of the solutions division packed up together. VISCAT was founded in March 2025, and the substantive team build-out was completed in November that year. About five months after its launch, the company delivered STAR-Core for logistics transport robots at a large conglomerate and supplied the same solution to multiple Samsung Group factories. It is also pursuing collaborations in the smart farm sector. Within six months of completing the team build-out, it generated approximately KRW 360 million in revenue. Challenges remain. The company must overcome resistance from on-site managers who are uncomfortable with automation, concerns from workers about job losses, and the sturdy barriers posed by major corporate system integration (SI) firms.
● Toward the ‘dark factory’ and beyond VISCAT is building a STAR-Grapher testbed in Geumjeong-dong, Gunpo, Gyeonggi Province. The goal is to mount more than 50 different types of robots, equipment and sensors on the system and demonstrate integrated operation scenarios. With performance indicators and certifications secured, the company plans to move into full-scale sales in the second half of this year.
Its main targets are small and medium-sized manufacturers. These companies typically generate operating profit in the KRW 10–20 billion range, are highly labor-dependent, but are eager to transition to automation. At one plant in Geomdan, Incheon, which Ko visited himself, 20–30 workers were originally needed, but now there are only seven. “They cannot hire even if they want to, so introducing robots is not optional,” he said. “STAR-Grapher will really demonstrate its value on lines where four or five robots are operating.” The ultimate goal is to become the internal solution for “dark factories”—fully automated factories of the future.
The application scope of the ontology framework extends beyond manufacturing sites. A construction company has requested an estimate from VISCAT for a proof-of-concept project to integrate and operate automatic doors, elevators and delivery robots within a smart city complex. Once it closes a pre-Series A funding round of about KRW 5 billion, currently under discussion with three investors to be completed within the year, the company plans to accelerate its entry into global markets.
There are risks. Designing and managing an ontology framework for each factory still requires substantial manpower and advanced expertise. In factory environments where absolute reliability is required, a single malfunction can shatter trust. Ko has a clear principle for overcoming this. “A factory cannot be entrusted to AI that cannot filter out hallucinations,” he said. “Ontology must form the basis of the rules, and large language models (LLMs) should operate on top of that as an interface for communicating with people.”
ⓒ dongA.com. All rights reserved. Reproduction, redistribution, or use for AI training prohibited.
Popular News